
Every programming paradigm has a 'Hello World' program. I try out something similar in Player-Stage and in process acquaint myself with various newer aspects of Player-Stage. After trying out player simple.cfg to check out Player-Stage installation, here I try to understand the involved working principles.
'HELLO WORLD'
 These 6 files contains information and configuration of the simulation.
These 6 files contains information and configuration of the simulation.
1. cave.png
This file contains the 'picture' of the environment.

2. map.inc
This file contains a floor plan and is included (.inc file) in simple.world.
This file contains a floor plan and is included (.inc file) in simple.world.
3. pioneer.inc
This file contains the information about the robot model, the geometry, wheels etc of the robot. This file is included in simple.world
4. sick.inc
This file contains SICK LMS 200 configurations, factory settings and geometry. This file is included in simple.world


5. simple.cfg
The configuration (.cfg) file tells the player that there is a driver called stage in stageplugin library. This file enables player to 'talk' to the driver.


For real robots the drivers are build into player, for a simulation the driver is always stage.
6. simple.world
It contains the environment details,

and also the robot coordinates and robot behaviour

The 'pose' is the robot coordinates (x,y,z) and the heading angle (also called yaw). 'wander' is the default behaviour (this is new plugin API to Stage, earlier versions did not have it).
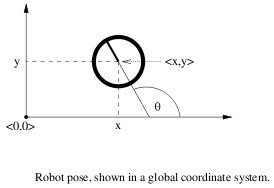
Any robot (or autonomous vehicle) navigation can be defined completely by the 3 coordinates and the heading a angle.


ON RUNNING THE SIMULATION
Before the screen with the little red robot pops up, loads of command flashes across the terminal window.


2 important aspects ;
(a) wander the wander is the default behaviour, via the simple.world file. There are other Stage controllers which can be used to obtain other behaviours and informations.
the wander is the default behaviour, via the simple.world file. There are other Stage controllers which can be used to obtain other behaviours and informations.
(a) wander
 the wander is the default behaviour, via the simple.world file. There are other Stage controllers which can be used to obtain other behaviours and informations.
the wander is the default behaviour, via the simple.world file. There are other Stage controllers which can be used to obtain other behaviours and informations.
(b) port 6665
 port 6665 is the default port for Player and Stage.Player and Stage communicate through this port.
port 6665 is the default port for Player and Stage.Player and Stage communicate through this port.
REFERENCES
(1) Player/Stage Manual
(2) Richard Vaughan. "Massively Multiple Robot Simulations in Stage"
(1) Player/Stage Manual
(2) Richard Vaughan. "Massively Multiple Robot Simulations in Stage"
No comments:
Post a Comment